







Онлайн услуги
-
Опишите подробнее процедуру подписки на журнал
Подписка на журнал осуществляется через АК «Matbuot tarqatuvchi», ОАО “Узбекистон почтаси” и их филиалы, а та...
-
Можно ли скачать журнал в PDF формате?
Да, можно...
Чтобы высказать Ваши предложения, замечания или задать вопрос , пожалуйста, заполните приведенную ниже форму.Подробнее
В данном разделе Вы можете ознакомиться с текущими вакансиями и/или разместить своё резюмеПодробнее
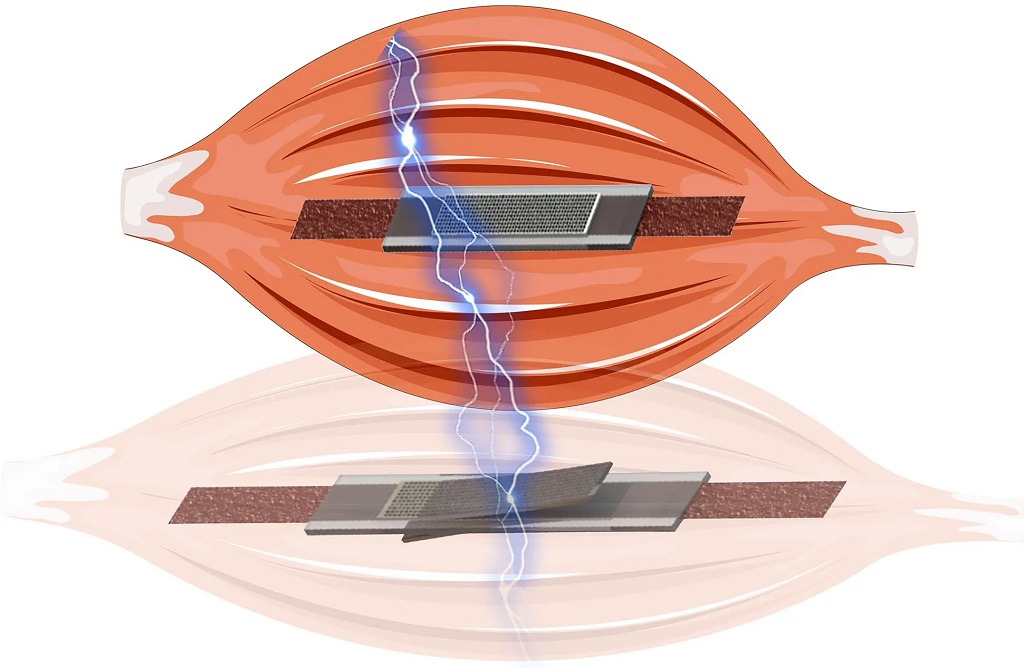
Искусственные мышцы, которые меняют жесткость под действием напряжения
Ученые Лондонского университета имени королевы Марии (Великобритания) разработали искусственную мышцу, которая может превращаться из мягкой в твердую в ответ на изменение электрического напряжения. Технология предназначена для того, чтобы имитировать человеческие мышцы как в движениях, так и в способности ощущать усилия и деформации. Мышца изготовлена с использованием углеродных нанотрубок, покрытых силиконом для формирования катода, который также способен воспринимать усилия, и анода из мягкой металлической сетки, образующего исполнительный слой между анодом и катодом.
Полученная искусственная мышца может плавно переходить из мягкого состояния в твердое, сокращаясь при этом и ощущая собственную деформацию. Исследователи надеются, что эта технология окажет неоценимую помощь при создании медицинских т. н. "мягких" роботизированных элементов, например, в компонентах протезов или реабилитационного оборудования.
Свою разработку британские ученые описали в статье, опубликованную в журнале Advanced Intelligent Systems.
"Мягкая" робототехника обладает огромным потенциалом в области медицины. Гибкость и эластичность таких роботов позволяет им взаимодействовать с мягкими тканями, не вызывая их повреждения, в отличие от более жестких электрических компонентов. Однако до сих пор во многих мягких робототехнических системах использовались пневматические приводы, в которых движение обеспечивается за счет сжимающих усилий, действующих на газы или жидкости, находящиеся в замкнутых элементах.
Это имеет свои преимущества, но не позволяет точно имитировать работу наших мышц, которые функционируют совершенно иначе за счет действия мышечных волокон, плавно переходящих при сокращении мышцы из мягкого состояния в твердое. Кроме того, простые актуаторы имеют ограниченные возможности по восприятию окружающей среды и измерению силы, которую они прикладывают, и сил, действующих на них.
Новейшая искусственная мышца выводит мягкое управление роботами на новый уровень. Она обладает гибкостью и растяжимостью, аналогичными естественным мышцам, выдерживая растяжение на 200% по всей длине, и может переходить из мягкого состояния в твердое, изменяя жесткость в 30 раз, когда она сжимается под воздействием электрического напряжения. Благодаря электрической чувствительности он может срабатывать быстрее, чем обычные мягкие приводы.
Несмотря на то что до внедрения медицинских роботов в клиническую практику еще предстоит решить ряд проблем, данное исследование представляет собой важнейший шаг на пути к интеграции человека и машины. Оно закладывает основу для будущего развития роботизированных систем.
По материалам сайта: Medgadget.com